KLIENT:
Architektura Parametryczna
DATA:
2016
WSPÓŁPRACA:
Kacper Radziszewski
Marching Cubes
Nowy kierunek w procesie twórczym pojawił się w oparciu o podejście oddolne do projektowania algorytmicznego, jak i komputerowego wspomagania wytwarzania (Augugliaro, Lupashin and Hammer 2014). Rozwiązania oparte na analizie zachowania chmary nie wymagają wysokiego poziomu kontroli systemu, co pozwala na uniknięcie złożonego wieloparametrowego mechanizmu ustalania kształtu. Algorytmy inspirowane biologią stały się podstawą dla nieliniowego i niehierarchicznego podejścia do rozwiązywania zaawansowanych geometrycznych problemów. Przedmiot aplikacji inteligencji chmary został zbadany w eksperymencie na podstawie zasady poruszania się uciekających ptaków (Chazeele, 2014). Symulacja zachowanie zbiorowego charakterystycznego dla zwierząt tej samej rasy, połączonych w jedną chmarę, pozwala myśleć o nich, jako o jednym większym, wieloelementowy organizmie. Z matematycznego punktu widzenia, powstaje zachowanie wynikające z prostego zestawu reguł, zbudowanego przez samodzielne jednostki. Wirtualna kontrola zachowania roju i możliwości jego zastosowania stała się istotnym tematem w współczesnym projektowaniu generatywnym ze względu na dostępność wielu narzędzi projektowych opartych na zasadzie boids. (Reynolds, 1987) Przeprowadzony eksperyment bada potencjał inteligencji chmary (Bonabeau, Dorigo i Theraulaz, 1999) podczas procesu formowania kształtu. Celem algorytmu było wygenerowanie przestrzennej struktury pomiędzy dwiema wstępnie zdefiniowanymi prostopadłymi obszarami w odległości 640 cm, przy jednoczesnym uniknięciu przecięcia z elementami budynku na swojej drodze. Struktura miała być możliwa do sfabrykowania przez algorytm oparty na predefiniowanych modułach. Każdy z agentów tworzących strukturę miał taki sam zestaw parametrów w oparciu o zasady Craiga Reynoldsa: separacja, wyrównanie i spójność. Separacja umożliwiała zachowanie odpowiedniej odległości od otaczających czynników w celu uniknięcia kolizji i zachowania odpowiedniej wielkość stada. Wyrównanie sprawiło, że ruch chmary był płynny. Funkcja spójności została wykorzystana do dwóch celów, aby utworzyć cel dla ruchu stada w drugim obszarze oraz powstrzymać chmarę przed rozłączaniem się w oddzielne grupy.
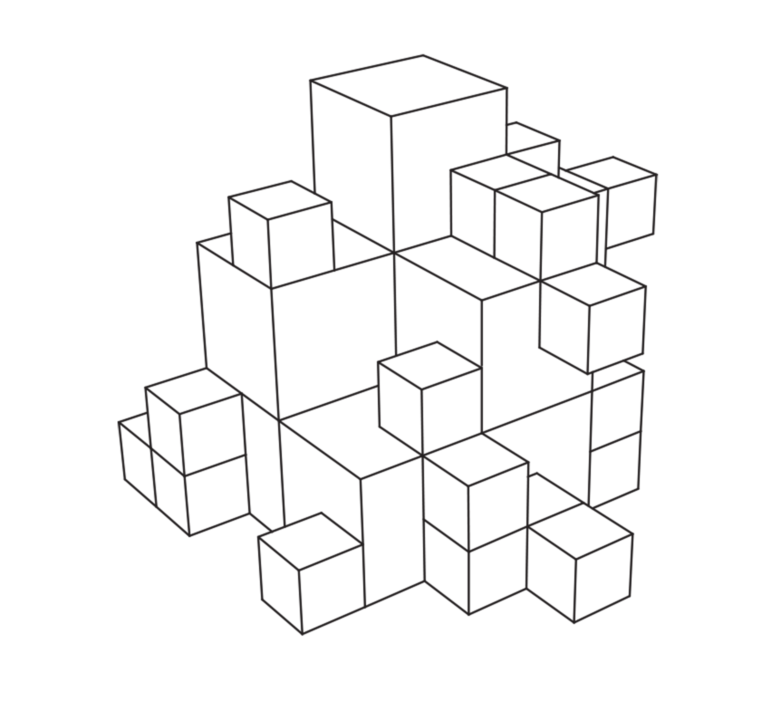
Faza produkcji wymagała w pierwszym etapie przetwarzania danych z ruchu stada. Każda iteracji, powodująca translokację stada, została zarejestrowana, tworząc chmurę punktów ścieżki agentów. Wygenerowana chmura punktów została wokselowana w kostki z krawędzią o rozmiarze 100 mm lub 200 mm. Wygenerowany model zostały wykonany ze kostek styropianowych, jako połączenie dwóch obszarów- początku oraz celu, przy jednoczesnym unikaniu kolizji z elementami wnętrza budynku.
Fotografie: Robert Juchnevic